
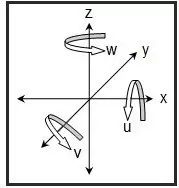
坐標系的作用是,在測量機行程的3D空間內定義零件位置和方向,它能具體的告訴測量機零件擺放在哪里(X/Y/Z的零點),是一個什么樣的角度(I/J/K矢量)。而如果零件尚沒有建立坐標系,那么它會擁有六個自由度:旋轉的三個度(關于 X/Y/Z軸)和平移的三個度(關于X/Y/Z軸的零點); 如下圖所示,該圖表展示了3D空間的6個自由度(x,y,z,u,v和w)。
也就是說,是這六個自由度將零件固定住,而建立坐標系就是要確定六個自由度。在零件圖紙中,第一、第二與第三基準定義能夠固定六個自由度,也即建立坐標系。其中:
- 旋轉的三個度由基準特征的I,J,K矢量組成
- 平移的三個度由基準特征的X,Y,Z位置組成
坐標系創(chuàng)建基本法則:找正、旋轉、原點
1. 找正
約束旋轉的兩個度,使找正的軸匹配于選定特征的矢量。
要求:這是一個主要基準而且必須是具備矢量的3D特征。
典型特征:平面,圓柱,圓錐或者一個構造3D特征。
2. 旋轉
約束旋轉的一個度。以找正的軸為中心使旋轉的軸匹配于選定特征的矢量。
要求:這是第二或者是第三基準,且必須是具備矢量2D或3D特征。
典型特征:平面,圓柱,圓錐或者一個構造的2D/3D特征,例如選擇任何兩個點類型特征來構造一條用于旋轉的直線。
3. 原點
在X,Y,Z軸約束平移的三個度(原點)。
要求:按照第一,第二,第三基準的順序或者根據(jù)圖紙具體要求設置原點。
典型特征:任何特征。
坐標系建立小提示
- 先找正 ,然后旋轉,接下來為X, Y, Z軸設置原點。永遠不要在找正前旋轉!
- 總是在測量2D特征(直線和圓)前找正。
- 總是在測量點(在X, Y, Z軸測量點)之前找正和旋轉。
- 測量程序中保存的坐標系沒有數(shù)量限制。
- 旋轉的右手法則 - 右手大拇指指向圍繞旋轉軸的正方向(+X, +Y, 或+Z)。手自然卷曲的方向為圍繞該軸的正旋轉方向。負旋轉方向為相反方向。



